A Kawasaki confirmou que o Corleo, veículo robótico de quatro patas inspirado em um cavalo, deixou o status de conceito e já tem cronograma definido para chegar ao mercado. A estreia comercial, antes prevista para 2050, foi adiantada para 2035.
Primeiros protótipos
De acordo com a fabricante japonesa, o primeiro Corleo totalmente funcional deve ficar pronto em até quatro anos. Demonstrações públicas estão programadas antes do início das vendas ao consumidor final.
O projeto ganhou força com a criação do Safe Adventure Business Development Team, unidade dedicada exclusivamente ao robô. A Kawasaki pretende disponibilizar o veículo para uso de visitantes na Expo 2030, em Riade, Arábia Saudita.
Origem e evolução
Apresentado ao público na Expo 2025, em Osaka, o Corleo chamou atenção por combinar locomoção em quatro “cascos” mecânicos com um motor a hidrogênio de 150 cc, responsável por gerar eletricidade para o movimento das pernas. O combustível fica armazenado em cilindros na parte traseira, garantindo emissões reduzidas e funcionamento silencioso.
Simulador chega antes
Antes do lançamento físico, a Kawasaki planeja liberar, em 2027, um simulador de pilotagem que usará dados reais do desenvolvimento, incluindo modelos 3D e informações de movimento. O sistema deverá ter aplicações em games e e-sports.
Recursos técnicos
Projetado para terrenos montanhosos e acidentados, o Corleo combina tecnologias de motocicletas com robótica avançada. As pernas traseiras operam de modo independente para absorver impactos, enquanto o controle é feito principalmente pelo deslocamento do peso do piloto, em uma dinâmica semelhante à montaria tradicional.
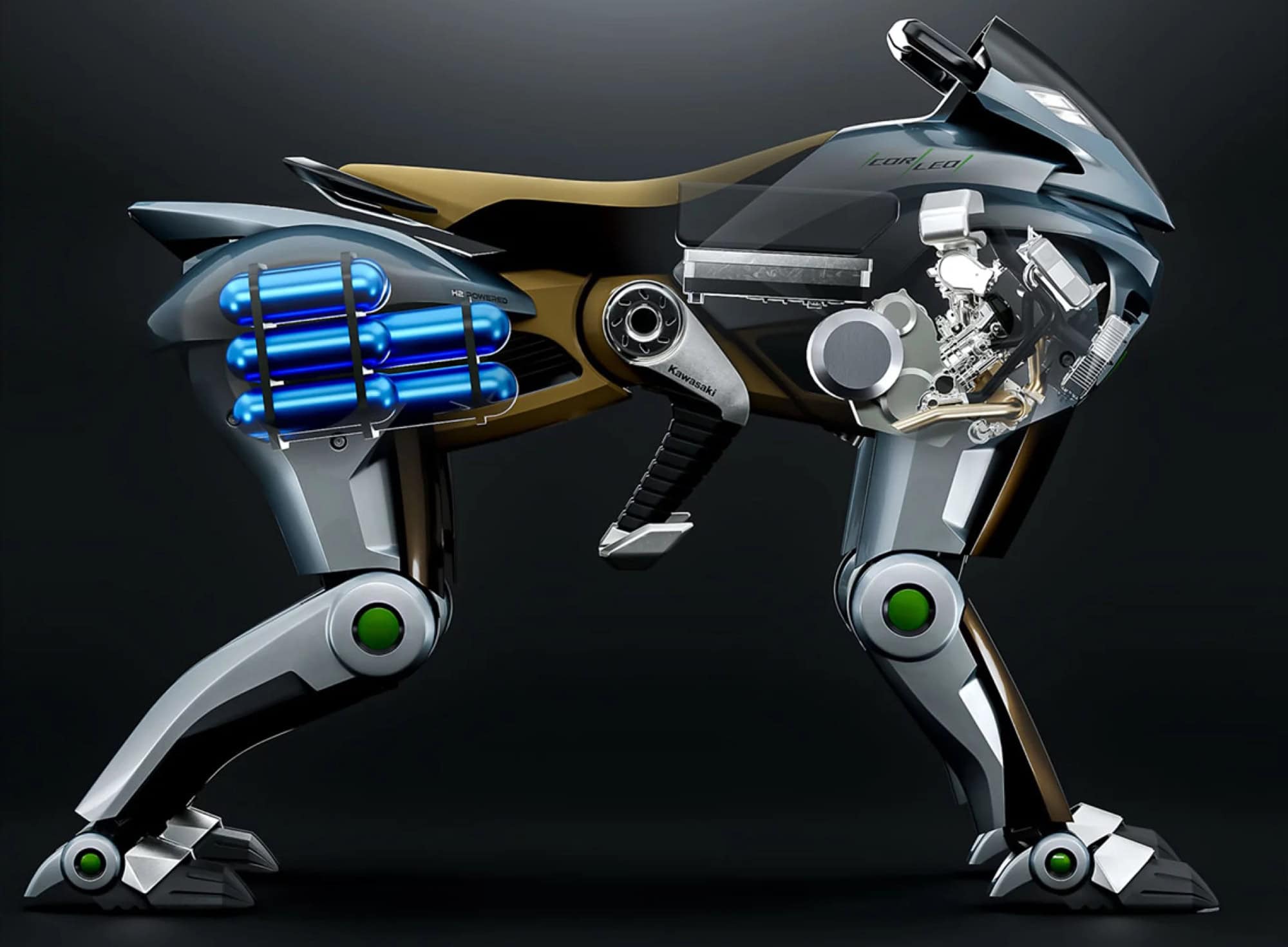
Imagem: Kawasaki
O robô contará ainda com inteligência artificial para adaptar a tração a diferentes superfícies, como rochas e áreas alagadas, além de uma tela de navegação com GPS para traçar rotas e manter o centro de gravidade estável.
A Kawasaki ainda não divulgou quantas unidades pretende produzir nem o preço estimado do Corleo quando chegar ao mercado.
Com informações de WizyThec
{kind=link}