O Instituto de Tecnologia da Califórnia (Caltech) apresentou o X1, sistema robótico que integra múltiplos modos de locomoção em uma única plataforma. Resultado de três anos de pesquisa em parceria com o Instituto de Inovação Tecnológica (TII), de Abu Dhabi, o projeto reúne um robô humanoide capaz de caminhar com um módulo que voa e se desloca sobre rodas.
Como funciona o X1
Na demonstração realizada no campus do Caltech, o humanoide UnitreeG1 transportou o robô multimodal M4 como se fosse uma mochila. Durante o percurso, o G1 caminhou, subiu uma ladeira e, em seguida, liberou o M4. Imediatamente, o M4 ativou o modo drone, sobrevoou um lago e depois passou a rodar até o ponto designado para a “emergência”, onde voltou a se encontrar com o parceiro humanoide.
Colaboração entre equipes
Segundo Aaron Ames, diretor do Centro de Autonomia e Tecnologias de Robôs (CAST) do Caltech, o objetivo é unir os pontos fortes de cada forma de locomoção em um único sistema. Para alcançar esse resultado, quatro grupos contribuíram:
- Grupo de Mory Gharib (Caltech): robôs aéreos, plataformas sobre rodas e sistemas de controle.
- Laboratório de Aaron Ames (Caltech): locomoção humanoide e algoritmos de operação segura.
- TII (Abu Dhabi): autonomia, sensoriamento urbano e computação embarcada.
- Universidade Northeastern: design de robôs adaptáveis.
Autonomia e sensoriamento
O X1 utiliza LiDAR, câmeras e telêmetros para mapear o ambiente e escolher rotas sem intervenção humana. Modelos matemáticos combinados com aprendizado de máquina permitem que o sistema tome decisões em tempo real, supere obstáculos e até carregue outros robôs quando necessário.
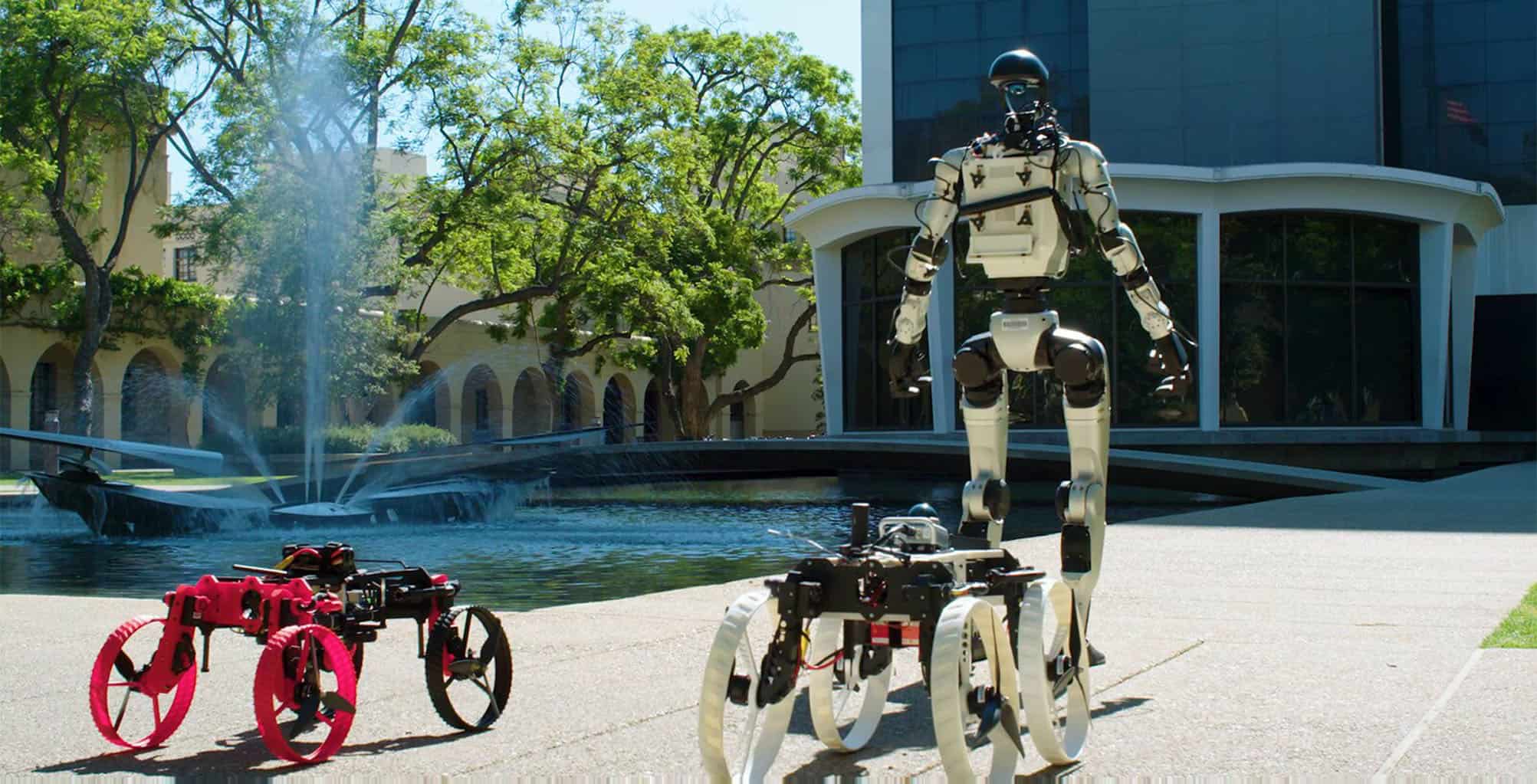
Imagem: Divulgação
Próximos passos
A equipe agora trabalha para aumentar a segurança e a confiabilidade do X1, visando aplicações em ambientes complexos e desafiadores do mundo real, como missões de resgate e resposta a desastres.
Com informações de WizyThec
{kind=link}